测控信综合系统 (tracking-identification-command guidance-telemetry unified system, TRICOT)
简介
在跟踪目标的同时通过同一微波信道传输识别、指令和遥测信息的雷达系统,它的全称是跟踪-识别-指令制导-遥测综合系统。 普通雷达的信标系统时间利用率很低,属单通道传输。若采用时间分隔法,地面雷达按二进制发射询问码和遥控指令,信标机也按二进制发回应答码和遥测数据,就能同时完成雷达跟踪、识别、指令制导和遥测 4种功能。测控信综合系统的最早设想出现于20世纪50年代末期,随后在美国得到应用。中国在1970年设计了控制无人驾驶对象的测控信综合系统。
组成
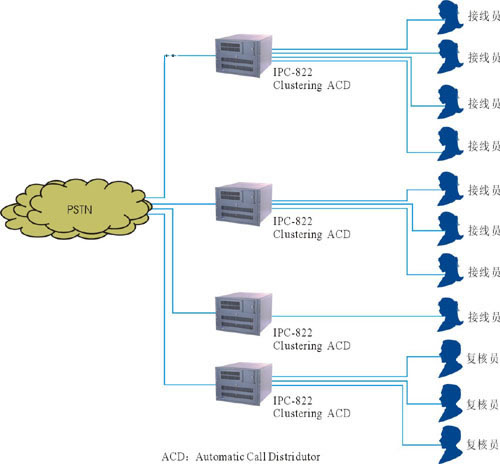
测控信综合系统由空载测控信标机和地面测控信雷达系统两大部分组成。空载测控信标机装在被跟踪的对象上,由询问解码和应答编码器、指令解码器、遥测编码器等组成。 3种信息通过共同的微波天线和收发机传输。地面测控信雷达系统由精密跟踪雷达(例如单脉冲体制)加上制导指令编码器、遥测信号解码器以及供指挥用的数据处理机、数字显示器、航迹指示装置等组成。这时雷达所发射的就不再是有一定重复周期的单个脉冲信号,而是有一定重复周期的脉冲组信号,例如发射由3个脉冲组成的询问码和由5个脉冲组成的制导指令,共由8个脉冲组成的脉冲串。若制导指令采用二进制编码,由5 个脉冲组成的制导指令可编为31条。这时雷达所接收到的也是脉冲组信号,例如接收由空载测控信标机发回3 个脉冲应答码和11个脉冲组成的八路遥测数据。询问码和应答码的脉冲个数,以及制导指令和遥测数据的编码脉冲个数,依系统的设计要求而不同。
工作过程
测控信综合系统的工作过程是:无人驾驶或有人驾驶对象发射(起飞)后,空载测控信标机通电等待接收询问码。当地面测控信综合系统搜索到目标时,空载测控信标机被询问码打开,发回应答码,地面测控信综合系统接收应答码后转入跟踪。同时接收空载测控信标机发回的遥测数据信号(例如油量、发动机转速、飞行高度等),经解码后输入数据处理机,并用各种显示方式提供给指挥人员。这时雷达获得的目标三度空间数据输入到数据处理机,经过坐标变换将极坐标数据转换为地理坐标数据,将目标航迹自动绘于供指挥用的航行地图上。指挥人员可依飞行状况发出一系列制导指令(例如左舵、右舵、爬高、下滑、95%油门等),使被跟踪的对象完成预定的任务。地面测控信综合系统也可装于空中供指挥用的飞行器上,形成空中指挥系统。测控信综合系统中的询问与应答码是识别信号,有提高抗干扰能力的作用。空载测控信标机发射功率远低于地面系统,天线增益较小,远距离工作时遥测信号易受地表杂波的影响,故可采用诸如伪随机码等抗干扰能力较强的编码方式。测控信综合系统的指令编码、遥测编码方式及其解码方式与一般系统相同(见遥测技术)。测控信综合系统在体制上并无重大的关键技术问题,但它大大增加了设备的复用性。