水下机器人涉及结构机械、材料、流体、控制、能源、计算机、水声等科学和技术的诸多领域。它既可用于海洋水文参数测量、矿产资源勘测、深海生物种群调查、深海基因获取等海洋工程,也可用于隐蔽侦查、载荷投送、中继通信等军事应用,已经产生了巨大的经济效益和社会效益,更具有潜在的应用前景。
其中水下机器人家族中的载人潜水器可运载科学家到达深海的海山、热液、盆地和洋脊等复杂海底地形进行巡航、悬停、正确就位和定点坐坡作业,使得人类身临其境探求深海奥秘的梦想得以实现,也使人类的智慧在深海作业中得到及时充分的发挥。因此,深海载人潜水器技术成为美、俄、法、日等世界各国投巨资争相研究的热点。
在深海载人潜水器控制系统研究中,两个最基础性的控制问题就是如何精确地知道潜水器当前的位置,第二个问题就是复杂海洋环境下控制参数如何自动调整。其中控制系统更是载人潜水器的核心技术之一。
一篇名为“载人潜水器‘蛟龙’号的控制系统研究”的研究论文近期发表于《科学通报》2013年第58卷的增刊Ⅱ,从“蛟龙”号控制系统的角度重点研究了其深海高精度导航、复杂海洋环境下的控制参数在线调整策略,而且还开发了载人舱内综合信息显控、水面监控、黑匣子数据分析和控制系统测试等平台。成功完成了世界上首次在7000米深度近海底的自动定向、定深、定高、定速和悬停定位5种全自动航行控制功能。领导该研究团队的是中国科学院沈阳自动化研究所机器人学国家重点实验室王晓辉研究员,主要研究人员包括刘开周、祝普强、赵洋、崔胜国等。
与浅水区域导航不同之处主要在于,浅水区域可以获得潜水器相对于海底的速度,而且可以按照一定周期/航程浮到水面进行校准,因此可以获得较高的导航精度。深海区域的导航则需要处理声学定位所固有的散点多,且观测周期与控制周期非同步等问题。
该研究的创新之处在于提出了无色自适应卡尔曼滤波的深海高精度导航定位方法。同时为了克服“蛟龙”号参数时变、闭环系统各环节的不确定性问题,借鉴专家控制经验,研究了基于模糊原理的控制参数在线自动调整的控制策略,以及基于数论的数值处理方法以获得执行机构的控制量。“蛟龙”号于2009年8~10 月、2010年5~7月、2011年7~8月和2012年6~7月分别完成1000,3000,5000和7000米级海上试验,并于2013年成功完成首次实验性应用,采集了丰富的海底样品,发现了新的物种,并且经受住了5年70余次的下潜考验。试验结果表明,“蛟龙”号控制系统的功能完善、性能先进、运行稳定可靠,同时也标志着我国载人深潜技术和深海资源勘探能力达到国际先进水平。
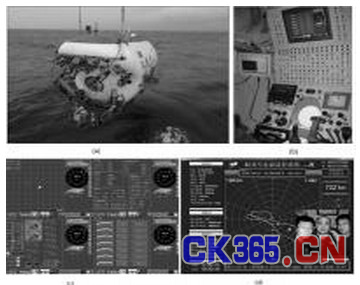
(a)载人潜水器蛟龙号(b)蛟龙号舱内控制系统(c)综合信息显控(d)水面监控
该研究也对大深度有人/无人深海装备的深海高精度导航、复杂环境下水下机器人的高精度控制等内容的深入研究具有极大的参考价值,此外,对于其他类型海洋工程装备的研发也具有重要的借鉴意义。


