研制高智能的全自主机器人模仿人类进行足球 比赛是当前人工智能和机器人领域的研究热点之 一。 全自主机器人足球比赛的特点是每个机器人完 全自治, 即每个机器人必须自带各种传感器、控制 器、驱动器、电源等设备。 比赛中, 各机器人队不允许 使用全局视觉, 也不允许人为的干预。 它涉及到机器 人控制系统的体系结构、移动机器人自定位、实时视 觉、多机器人传感器融合、多机器人协作、机器人的 学习等多项关键技术。
目前,举办全自主机器人足球比赛的国际组织 有两个:RoboCup 联合会和FIRA 组织。 RoboCup (Robo tWo rld Cup Soccer Gam es) 是由日本、欧美等国家发起并创立的组织, 从1997年开始每年举办 一届比赛。该组织在瑞士注册, 现有成员国近40 个,包括美国、德国、日本、意大利等发达国家。 RoboCup 的目的是促进人工智能、机器人技术及相关领域的 发展。它提供一个标准的机器人踢足球平台。在此平 台上,大量的技术可以被集成并接受检验。 RoboCup 有仿真组、小型组、中型组和四腿机器人组4 个主要 的比赛类型。FIRA ( Federat ion of In ternat ional Robo t2Soccer A ssociat ion) 是由韩国发起并创立的 组织, 从1997 年开始每年举办一届比赛,目前主要 由韩国、新加坡、巴西等一些国家的研究机构组队参 赛。
RoboCup 和F IRA 都设立了全自主机器人比 赛项目。 例如, RoboCup 的中型组(M iddle2Size L eague) 和F IRA 的RoboSo t, 其所涉及的机器人技 术完全相同。 本文将以RoboCup 中型组的比赛为 例, 对其中的关键技术进行分析。
1 关键技术
1. 1 机器人控制系统的体系结构
1. 1.1 单机器人系统的体系结构
在中型组比赛中, 单个机器人的控制系统广泛采用混合式的体系 结构, 控制系统的上层采用规划技术, 底层采用基于 行为的反应式控制技术, 这样既保证了系统的鲁棒 性和快速性, 又使系统具有较高的决策智能。 以德国弗赖堡大学队的机器人为例[ 1 ] (见图 1) , 感知模块接收机器人自身的传感器信息并通过 通信获得其他机器人的内部信息, 这些信息共同作 为规划层和行为控制层的输入, 使机器人有较多的 信息来进行决策, 提高了决策的正确性。 当行为控制 层产生运动到场地上某一点的行为时, 自动启动规 划层为机器人规划出一条到达目标点的最优路径。 行为控制层是一个由状态空间到行为空间映射构成 的规则库, 针对具体的环境, 机器人能够迅速地做出 反应。 Werger[ 2 ] 提出了一种完全反应式的结构, 并 将它应用到足球队“Sp irit of Bo livia”中。 在这种结 构中, 所有队员的个体行为, 以及队员之间的合作行 为都设计为反应式的。 该结构的优点是动作的连续 性、快速性比较好; 缺点是对具体机器的依赖性较 强,通用性差。
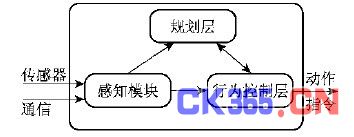
图1 单机器人系统的体系结构
1.1. 2 多机器人系统的体系结构
各队普遍采用 基于无线局域网(遵守IEEE802. 11 标准) 的通信技术。每个机器人和场外计算机作为网络的节点, 共同构成一个无线局域网络系统, 高达11Mb/s 的无线 网络为机器人之间的信息传递提供了一个快捷通 道。根据场外服务器是否参与决策, 本文将球队的体 系结构分为两种:集中与分布式结合的混合型结构 和完全分布式的结构。对于前者,场外服务器作部分 或全部的决策; 对于后者,场外服务器不参与决策,只用来建立全局模型。 伊朗Sharif 大学队采用前一 种结构[ 3 ] ,场外的服务器根据场上的情况来动态地 为单个机器人分配任务, 指定每个机器人的角色(前 锋、中场或后卫) ,这时球队的控制方式是集中式的; 当角色分配完成后,不同角色的机器人要根据场上 的具体情况自主地选择行为,做出反应,最终完成射 门的任务。 这时球队的控制方式是分布式的。德国弗 赖堡大学队和意大利的ART 队都采用后一种结 构,如图2 所示。图中场外计算机只负责建立全局模型,并通知每个机器人。它并不对机器人进行任务、 角色分配。场上的机器人需要自主地进行角色选择, 相互配合以完成射门的任务。

图2 机器人系统的体系结构
1.2 自定位
在RoboCup 比赛中, 移动机器人自定位是指机 器人确定其在比赛场中的全局坐标和姿态(前进方 向与假定坐标轴的夹角)。 机器人球员的决策很大程 度上取决于其在场上的位置, 因此自定位的成功与 否直接决定了机器人能否有效地完成赋予它的任 务。 由于机器人移动机构打滑、制造误差等原因, 其 自身携带的基于码盘的里程仪无法提供精确的位置 信息, 必须依靠机器人的外部传感器进行环境的感 知和特征匹配, 以实现较高精度的定位。 但无论是里 程仪还是其他传感器, 在快速变化的比赛现场获得 的数据都具有高度的不确定性, 如何在这些不确定 信息的基础上进行推理、判断, 始终是困扰移动机器 人的一个主要难题, 在机器人足球比赛中更是十分突出。
目前, 足球机器人定位主要采用视觉、超声、红外和激光等传感器。 常用的方法有两类:一类是通过识别标志来自定位;另一类是通过多传感器信息匹 配来自定位。
第1 类方法需要用视觉来实现。 它的基本原理 是将视觉的输入信息与事先定义的标志的颜色特征 相比较,通过计算与已知标志位置的相对位置关系 来推算出机器人自身的全场绝对坐标。 例如,意大利 ART 队的守门员通过视觉来实现自定位。 它使用两 个摄像头, 可分别获得守门员左右两边罚球区的边 线信息,通过几何计算,机器人可以确定自身的位置。 但是,机器人在足球场上经常处于运动状态,视觉信息中的噪声很大,这样,对视觉定位的抗干扰能 力提出了很高的要求。
第2 类方法的基本原理是将包括视觉的多种传 感器的感知进行信息融合,来克服单一传感器解决 不确定性信息的弱点,提高机器人的定位准确性。例如,德国弗赖堡大学队就采用此方法。首先,机器人从激光扫描仪得到的信息中提取直线段信息, 将此 信息与事先建好的球场模型相匹配来确定场地的边界。然后,结合里程仪的信息,通过卡尔曼滤波算法进行数据融合, 最终得到了机器人准确的全局位置 信息。 Iocch i[ 4 ]提出了一种比较通用的方法, 即机器 人利用传感器(视觉、声纳或激光) 提供的距离信息,通过霍夫变换提取出直线信息,然后将这些直线信 息与已知的RoboCup 比赛的环境模型相比较来确 定机器人的方位。
目前,机器人自定位的发展方向是在保持精确 性的前提下提高快速性和鲁棒性,通过协作式定位来纠正已有的错误定位也是一个值得注意的方向。
1.3 实时视觉
在RoboCup 的比赛环境中, 大部分的物体都是 通过颜色来区分的, 因此大多数的球队利用视觉来 识别物体, 进而标定位置。 但是, 动态比赛环境对视 觉的处理提出了很大的挑战。 一方面, 视觉的信息量 比较大, 而且动态的比赛环境使得视觉信息中含有 很大的噪声, 再加上场上的物体之间会相互遮挡, 造 成颜色之间的干扰。 另一方面, 在激烈的比赛中, 机 器人必须在很短的时间内(一般为100 m s) 做出决 策。 因此, 实时的视觉处理是一项非常关键的技术。 常用的视觉传感器大致可以分为: 全局视觉、单个摄 像机视觉、双摄像机视觉(立体视觉) 和全方位视觉 系统。
全局视觉系统是指采用全局静态彩色摄像机作为外部传感器, 并对移动机器人附加着色标记, 通过识别唯一的颜色特征完成定位。 此法虽然简单, 但不符合中型组比赛的要求, 只能用于小型组的比赛中。 单个摄像机视觉系统的几何特性相对简单, 如果不 考虑镜头所引起的图像畸变, 就可以把该模型简化为理想针孔式模型(透视投影) , 如图3 所示。这种模 型被大多数参赛队所采用。 例如, 德国弗赖堡大学队 的机器人使用单个摄像机来识别球的颜色, 它先粗 略地对球的位置进行标定, 然后通过多个机器人对 球的标定来校正球的位置。 双摄像机视觉模型主要 是用于获得物体的深度信息, 但它需要对图像进行 融合, 占用的处理时间较多, 而且在中型组比赛中并 不是很有用, 因此很少有参赛队采用。 全方位视觉传 感器系统是采用反射镜反射全方位环境, 然后输入到单镜头摄像机进行处理。 它的优点是可以获得全 方位的视觉信息。 例如, 机器人可以同时看到球和球 门, 因此这种视觉传感器系统为很多参赛队采用。 例 如, 意大利ART 队和日本大阪大学队都自行设计 了全方位视觉传感器系统。
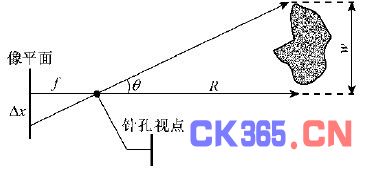
图3 理想针孔式透视模型
1.4 多机器人传感器融合
多机器人传感器融合(也称为分布式传感) 是指 机器人群体系统通过机器人之间的信息交互, 把分 布在不同机器人上的多个同类或不同类传感器提供 的局部环境信息加以综合, 以形成对环境相对完整 的感知。 通过多机器人传感器融合, 单个机器人可以 得到比较精确的全局环境模型, 提高机器人对赛场 情况判断的准确性、完整性和实时性。 主要的传感器 信息融合方法有加权平均、贝叶斯估计、卡尔曼滤 波、统计决策理论、模糊逻辑、人工神经网络等。 在RoboCup 中型组比赛中, 德国弗赖堡大学队 比较成功地实现了多机器人的传感器融合, 球队的 每个机器人先通过多传感器融合获得局部环境的信 息, 然后场外的服务器对局部环境信息再次融合, 结 合卡尔曼滤波和M arkov 定位方法, 获得了比较精 确的全局环境模型。
多机器人传感器融合是一种很有发展前途的技 术, 但是, 由于传感器提供的信息受环境状态和传感 器本身特性的制约, 分布在不同机器人上的传感器 所提供的信息可能是不完整、不确定的、甚至是不正 确的,机器人之间也可能存在相互干扰。
1.5 多机器人的协作
多机器人的协作是指多个机器人通过协调各自 的行为, 合作完成共同目标。 多机器人的协作策略在 很大程度上决定了一支球队的强弱, 也是机器人智 能的一个集中体现。 在RoboCup 中, 一支球队中的 多个机器人要完成进球的任务, 就必须以一定的形 式组织起来, 以达到相互配合的目的。 常用的协作策 略有基于区域的队员组织和基于角色的队员组织两 种方法。 第1 种方法比较简单, 其基本思想是: 场外 的服务器为所有队员分配不同的区域, 处于某特定 区域的队员要自主地做出动作选择。 第2 种方法看 起来智能程度比较高, 其基本思想是: 队员通过交流 效用值来选择不同类型的角色, 队员组织起来后, 角 色之间有明显的配合。 伊朗Sharif 大学队采用第1 种方法[ 5 ]: 场外的服务器为所有队员动态地分配区域, 到达某特定区域的队员要自主地做出动作选择。 德国弗赖堡大学队和意大利的ART 队采用第2 种 方法: 所有队员(除守门员) 是以积极型、辅助型和策 略型3 种不同的角色组织起来的。 积极型队员去抢 球, 辅助型队员帮助它进攻, 策略型队员负责防守。 角色分配并不是固定的, 而是通过算法来实现的。
多机器人的协作对机器人的智能提出了很高的 要求: 单个机器人既要自主地完成个体行为, 又要与 其他机器人通信, 影响它们的行为, 同时自身的行为 又受到其他机器人的影响。 因此, 某一种策略的优劣 不仅与策略本身有关, 还与执行策略的机器人、具体 的环境密切相关。
1.6 机器人的学习
目前, 机器人的行为实现大部分是通过编程人 员手工编程来实现的。一方面, 由于编程人员的知 识、经历有限, 不可能考虑到现实中所有可能出现的 情况; 另一方面, 当任务和环境变得复杂时, 要完全 依靠程序员的手工编程实现机器人的行为, 就变得 非常繁重,甚至是不可能的。在这个背景下,具有自 学习能力的机器人成了一个新的研究热点。 而 RoboCup 比赛的环境是动态变化的,任务是复杂 的,要想取得好的成绩, 降低编程难度, 让机器人自学习是一个很好的途径。 由于增强学习可以实现机 器人在没有或只有很少先验知识的情况下, 通过学 习获得较高的反应能力和自适应能力, 因此这种方 法受到了人们的广泛关注[ 6 ]。
在训练单机器人技巧方面,N akamura[ 7 ]提出一 种自动分割状态空间的算法, 即通过状态空间的不 均匀分割来解决在应用增强学习中遇到的输入泛化 问题, 并将该算法应用到足球机器人的射门和截球 动作中。 此外, 一些学者正在研究如何通过学习获得 多个机器人的配合策略问题。 例如, 文献[ 8 ]中采用 增强学习方法实现了多个机器人球员的任务分工; U ch ibe 等[ 9 ]将增强学习应用到多机器人中, 通过学 习实现了两个机器人相互配合传球、射门的动作。 虽然增强型学习是一种很好的学习方法, 但是 由于机器人在学习之初, 没有或有很少经验, 这样, 机器人需要花费较长的时间通过在实践中不断积累 经验, 从而得到所需的规则。 这也是目前学习方法大 多应用于仿真和实验室环境的原因之一。
2 目前存在的难题和解决途径
综合上面的分析, 将3 支强队的关键技术进行比较, 如表1 所示。
表1:参赛强队关键技术比较

目前, 在全自主机器人足球赛中具有挑战性的难题是:
(1) 如何充分利用多个机器人的传感器信息以 获得对环境相对完整的感知。 单个机器人的感知总 是有限的。 在比赛中, 有效信息量越充分, 决策就越 具有理性。 在不能使用全局视觉的中型组比赛中, 利 用多机器人传感器融合来获得对环境相对完整的感 知是一条很有效的途径。 由于传感器提供的信息受 环境状态和传感器本身特性的制约, 分布在不同机 器人上的传感器所提供的信息并不是完全可靠的, 机器人之间也可能存在相互干扰。 因此, 解决该问题 可以根据每个机器人队员自身传感器的不同特点, 利用其优势, 避开其短处, 同时结合多机器人的协作 策略来制定相应的融合算法。
(2) 如何设计协作策略以提高机器人球队的整 体性能。 机器人之间的配合是机器人智能的一个集 中体现。 虽然每个参赛队都制定了自己的配合策略, 但是机器人在比赛中的表现却不太令人满意, 多个 机器人的配合不仅不易实现, 而且常常出现一方队 员相互干扰的现象。 解决该问题可以从两个方面考 虑: 一方面, 提高单个机器人的独立行为能力, 降低 单个机器人对其他机器人的依赖性; 另一方面, 在制 定协作策略时, 要充分考虑本队机器人的特点, 从简 单、实用的角度出发, 避免出现对单个机器人要求过杂, 逐步地将学习应 用到比赛中。
3 结论与展望
由上述分析可以预见,全自主机器人足球赛将 来几年的发展方向主要涉及以下方面:(1) 完善机器人球员的硬件,包括传感、控制和 运动机构; (2) 提高单个机器人的自主决策智能, 使每个 机器人更机智和更灵活; (3) 探索多机器人团队的组织和协作策略,提 高整个球队的群体智能; (4) 在比赛规则上朝更接近人类比赛规则的方 向发展, 机器人的尺寸有进一步小型化的趋势。全自主机器人足球比赛更接近人类足球队的比 赛方式, 相对于小型组的比赛,技术含量更高,难度 更大,更具挑战性。其中的关键技术也正是当今移动 机器人技术领域的热点问题,从某种程度上,代表着 世界机器人技术发展的方向。
虽然我国至今还没有一支球队参与过 RoboCup 中型组的比赛,但应该看到,我国在上述关键技术领域的研究已具备一定基础。近年来,许多 研究机构已经开始组建全自主机器人球队,相信在 不远的将来,我国的机器人球队必将驰骋在 RoboCup 中型组赛场。






