一、引言
在造纸行业中,经常需要高精度同步控制,特别是切纸机这样的机械,对于位置精度要求极高的情况下,靠通用变频器速度控制已经难以满足要求,一般只有采用直流或者交流伺服来解决,成本较高。本文针对这一情况,提出了采用艾默生网络能源有限公司生产的TD3000通用变频器的实现方案。
二、系统组成

图1 采用通用变频器控制的切纸机系统
图1中只画出有送纸和切纸相关部分的连接图,放卷控制和传送带控制等无关部分在图中未画出。1# INV采用标准TD3000产品,2# INV采用具有伺服功能的TD3000非标变频器,两台变频器由PLC通过RS485通信来控制。1# 变频器采用闭环矢量速度控制模式,速度精度可以达到0.1%以上,控制送纸辊的转速,同时送纸电机的速度经过X8进入2# 变频器作为同步跟踪控制的脉冲输入源,用来控制切纸辊的转动速度和位置。
三、工作原理框图
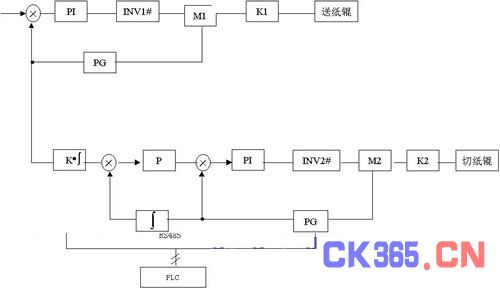
图2 切纸机控制原理框图
1、原理分析
INV 1# 工作于闭环矢量控制,K1为送纸机械减速比;INV 2# 工作于伺服控制模式,其中K通过上位机来设定,由切纸长度唯一确定,K2为切纸机械减速比。闭环矢量控制的速度、电流控制双闭环原理框图在图中未画出。K的推导计算如下:
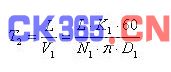
送纸线速度

(m/s) (1)
切纸长度

(m) (2)
式中, N1为送纸电机转速,K1为送纸机械减速比,V1为线速度,D1为送纸辊的直径,T2为切纸辊转动一圈的周期。
由式(2)、式(1)得
(s) (3)
同时我们可以采用切纸辊的转速 ,求出T2
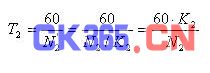
(s) (4)
由式(3)与式(4)相等,即
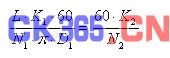
整理得
(5)
定义式(5)为跟踪速度增益K

(6)
改变不同的纸的长度L,可根据式(6)求出不同增益K,只要上位机实时地改变K,就可以实时调整切纸的长度。另外,需要注意的一点是,在本文的分析中,隐含了一个前提,那就是切纸辊旋转一周,即完成一次切纸过程。证明过程如下:
切纸线速度

(m/s) (7)
式中,D2为切纸辊的直径。
由式(1)与式(7)相等,可以求出

(8)
对照式(6)和式(8),可以得到

,即
对照式(6)和式(8),可以得到 ,即 。
2、精度分析
a、跟踪误差
由于INV 2# 采用伺服控制,由于送纸电机的加减速过程一般比较缓慢,加减速时间可达到30到60秒,甚至更长,因此切纸机位置动态跟踪误差可以做到五个脉冲以内,则整个切纸过程跟踪最大误差 可以控制在式(9)要求的范围内。在稳态过程中,由于TD3000闭环矢量的高精度,可以保证稳态跟踪误差小于两个脉冲,跟踪稳态误差只有动态1/4。

(9)
式中, 为误差脉冲数, 编码器每转脉冲数。可以看出编码器每转脉冲数增大,可以减小跟踪误差,但是由于编码器接口速度限制,一般不超过50kHz,选用2000P/R的编码器已经到了极限。假设D2为400mm,P为2000P/R,K2为14,代入式9,可以求出最大跟踪误差为0.22mm,稳态跟踪误差为0.08mm。
b、速度分辨率误差
1#1NV变频器频率分辨率为0.01Hz,对应电机转速分辩率为0.3rpm(按照4极电机考虑),经过X8输入对应每分钟脉冲为600个,每秒种则对应10个。根据(a)的计算,速度分辩率造成的误差将小于0.44mm/s,假设切纸机的最高线速度为2m/s,速度精度将达到万分之二,完全可以满足高速切纸机的要求。实际上,由于在本方案中,INV 2# 完全跟踪INV 1# 转速和位置,即使有速度分辨率误差,对输出切纸精度也无任何影响。
c、跟踪速度增益K的分辨率对精度的影响
假设切纸长度为550~1350mm,最大车速为2000mm/s,送纸辊的直径为400mm, 送纸机械减速比K1为16,切纸机械减速比K2为14,通过式(6)可以计算出K的变化范围为0.814~1.998。
增益K的设定范围为0.000~9.999,分辨率为0.001,如果采用2000P/R的编码器,电机最大转速为1440rpm,对应最大脉冲频率为 48KHZ,对应最大分辨误差为24P/s(1/2*0.001*48KHz)。考虑在最大车速2m/s的情况下,最大绝对误差应该对应最大切纸长度 1.35m/s的时候,即 个脉冲,对应绝对误差根据式(9)计算为0.717mm。需要说明一点的是,此精度只影响设定长度,并不影响切纸长度的一致性。
四、调试及注意问题
运行调试时,必须保证送纸电机和切纸电机处于完全停机状态,通过上位机或者外部端子,先让切纸电机运行,后再让送纸电机运行,同时给送纸电机设定频率。送纸电机驱动变频器的加减速时间可设定为30~60s,而切纸电机驱动变频器在不过压过流的情况下,可以设定最短的加减速时间,一般小于0.5s,在精度要求较高的场合,需要快速的起制动控制,有必要添加制动电阻或者制动单元(30KW以上变频器)。
由于位置控制对于编码器的抗干扰和可靠性有较高的要求,必须选用欧姆龙等厂家高可靠性产品,输出电路形式为集电极开路输出,工作电压为24~30VDC,每转脉冲数为2000。但要特别注意,上位机软件在更改K的时候,需要设定为不存贮方式,防止常期多次存贮造成EEPROM的损坏。
五、结论
本文提出的方案具有切纸长度、相对精度与工作车速无关的优点,易于实现PLC通信的分时控制和进行切纸长度的随意调整,可大大降低低速引纸速度,可达到额定车速1/50以下,降低了工人引纸的操作难度和强度,缩短低速引纸时间,提高了生产效率。另外,该方案还可以应用在其他如造纸、起重等需要高精度同步跟踪控制的场合,对于各种需要同步控制的场合有一定的参考价值。






