传感器故障主要包括:完全失效故障、固定偏差故障、漂移偏差故障和精度下降四类。如图1所示。
失效故障是指传感器测量的突然失灵,测量值一直为某一常数;偏差故障主要是指传感器的测量值与真实值相差某一恒定常数的一类故障,从图中可见,有故障的测量与无故障的测量是平行的;
漂移故障是指传感器测量值与真实值的差值随时问的增加而发生化的一类故障;
精度下降是指传感器的测量能力变差,精度变低。精度等级降低时,测量的平均值并没有发生变化,而是测量的方差发生变化。
固定偏差故障和漂移故障都是不容易发现的故障,在故障发生的过程中会引起一系列的无法预计的问题,使控制系统长期不能正常发挥作用。
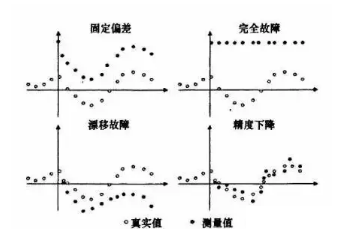
图1 传感器的故障类型
传感器的故障分类方式
1、按传感器故障程度分类
按传感器故障程度的大小可分为硬故障和软故障。
硬故障泛指结构损坏导致的故障,一般幅值较大,变化突然;软故障泛指特性的变异,幅值较小,变化缓慢。
硬故障也称完全故障,完全故障时测量值不随实际变化而变化,始终保持某一读数。通常这一恒定值一般是零或者最大读数。故障测量值大致是一条水平直线。
软故障包括数据偏差、漂移、精度等级下降等。软故障相对较小,难于被发现,因此,从某种意义上来讲,软故障危害比硬故障危害更大,其危害逐渐引起了人们的重视。
2、按故障存在的表现分类
按故障存在的表现可分为间歇性故障和永久性故障。
间歇性故障时好时坏;永久性故障失效后,不能再恢复正常。
3、根据故障发生、发展的进程分类
根据故障发生、发展的进程可分为突变故障和缓变故障。
突变故障信号变化速率大;缓变故障信号变化速率小。
4、按故障的原因分类
按故障原因可分为偏差故障,冲击故障,开路故障,漂移故障,短路故障,周期性干扰,非线性死区故障。
偏差故障的故障原因为:偏置电流或偏置电压等;
冲击故障的故障原因是:电源和地线中的随机干扰,浪涌、电火花放电,D/A变换器中的毛刺等;
开路故障的故障原因:信号线断、芯片管脚没连上等;
漂移故障的故障原因:温等;
短路故障的故障原因:污染引起的桥路腐蚀、线路短接等;
周期性干扰的故障原因:电源50 Hz干扰等;
非线性死区故障的故障原因:放大器饱和、含有非线性环节等。
另外,从建模、仿真的角度出发,可分为乘性故障和加性故障。对于偏置故障,在原信号上加上一个恒定或随机的小信号;对于冲击干扰,可在原信号上叠加一个脉冲信号;对于短路故障,信号接近于零;开路故障,信号接近传感器输出最大值;漂移故障,信号以某一速率偏移原信号;周期性干扰故障,原信号上叠加某一频率的信号。
传感器故障的诊断方法
从不同角度出发,故障诊断方法的分类不完全相同。现简单地将故障诊断方法分为:基于解析数学模型的方法和不依赖于数学模型的方法。
1、基于解析数学模型的方法
根据残差产生的形式不同,基于解析数学模型的方法可以进一步分为:参数估计法、状态估计法和等价空间法。
基于模型的故障诊断方法,是一种最早发展起来的诊断方法,同时也是一种研究、应用最广泛的诊断方法。
优点是模型机理清楚,结构简单,易实现,易分析,可实时诊断。在故障诊断领域具有重要的地位,在今后的发展中依然会是传感器故障诊断方法的主要研究方向。
缺点是计算量大,系统复杂;存在建模误差,模型的适应性差;可靠性差,容易出现误报、漏报等现象;外部扰动的鲁棒性,系统的噪声和干扰不敏感。
目前,这种诊断方法的研究成果仍然主要集中于线性系统,对深入研究非线性系统的通用故障诊断技术具有重要的意义,同时,鲁棒性问题也具有很高的研究价值。表l介绍了模型法中一些故障诊断方法的优点和缺点。
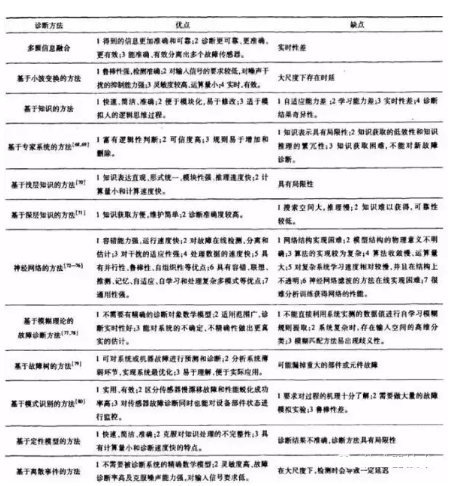
表1模型法中一些故障诊断方法的优点和缺点的比较
2、不依赖于数学模型的故障诊断方法
当前,控制系统变得越来越复杂,由于实际中很难建立控制系统的精确解析数学模型,当存在建模误差时,基于模型的故障诊断方法将出现误报、漏报等现象,因此不依赖于模型的故障诊断方法受到了人们的高度重视。
不依赖数学模型的方法的优点是不需要对象的准确模型,并且适应性强。其缺点是结构复杂,难于实现。
这种不依赖于系统模型的故障诊断方法可分为基于数据驱动的方法的故障诊断方法、基于知识的故障诊断方法和基于离散事件的方法等。
2.1 基于数据驱动的方法
基于数据驱动的方法有两大类:信号处理方法和统计方法。
常用的一些基于信号处理的故障诊断方法有:绝对值检验和趋势检验,利用Kullb ack信息准则的故障检测,基于自适应滑动Lattice滤波器的故障检测方法,基于信号模态估计的故障检测方法相关分析法、小波分析方法和信息融合方法等。
2.2 基于知识的方法
基于知识的故障诊断方法协可分为基于症状的故障诊断方法和基于定性模型的故障诊断方法两种。
2.3 基于离散事件的方法
基于离散事件的故障诊断方法是近年来发展起来的一种新型故障诊断方法。其基本思想是:离散事件模型的状态既反映正常状态,又反映系统的故障状态。
表2给出了一些故障诊断方法的优点和缺点
随着理论研究的进展和技术水平的不断提高,传感器故障诊断的研究会更趋于实用化,一些在实际中遇到的问题会逐步得到解决。