激光陀螺仪的结构
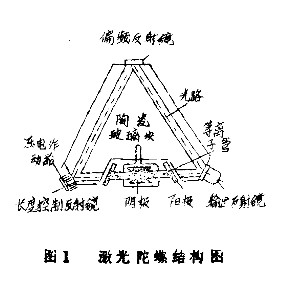
激光陀螺仪的光环路实际上是一种光学振荡器,按光腔形状分有三角形陀螺和正方形陀螺,腔体结构有组件式和整体式两种,一般三角型激光陀螺用的最多。图1是一个典型的激光陀螺结构示意图。它的底座是一块低膨胀洗漱的三角形陶瓷玻璃,在其上加工出等边三角形的光腔,陀螺仪就由这样闭合的三角形光腔组成,三角形的边长安装在每个角上的输出反射镜,控制反射镜和偏量反射镜限定,在三角形的一条边上安装充以低压氦氖混合气体的等离子管。
激光陀螺仪的原理
激光陀螺仪的工作原理为:在闭合光路中,由同一光源发出的沿顺时针方向和反时针方向传输的两束光发生干涉,利用检测相位差或干涉条纹的变化,可以测出闭合光路旋转角速度。激光陀螺仪的基本元件是环形激光器,环形激光器由三角形或正方形的石英制成的闭合光路组成,内有一个或几个装有混合气体(氦氖气体)的管子,两个不透明的反射镜和一个半透明镜。用高频电源或直流电源激发混合气体,产生单色激光。为维持回路谐振,回路的周长应为光波波长的整数倍。用半透明镜将激光导出回路,经反射镜使两束相反传输的激光干涉,通过光电探测器和电路得到与角速度成比例的数字信号。激光陀螺仪的特点
激光陀螺仪没有旋转的转子部件,没有角动量,也不需要方向环框架,框架伺服机构,旋转轴承,导电环及力矩器和角度传感器等活动部件,结构简单,工作寿命长,维修方便,可靠性高,目前激光陀螺仪的平均无故障工作时间已达到九万小时以上。
激光陀螺仪的动态范围很宽,测得速率为±1500度每秒,最小敏感角速度小于±0.001度每小时一下,分辨率为/弧度秒数量级,用固有的数字增量输出载体的角度和角速度信息,无需精密的模数转换器,很容易转换成数字形式,方便与计算机接口,适合捷联式系统使用。
激光陀螺仪的工作温度范围很宽(从-55℃~﹢95℃),无需加温,启动过程时间短,系统反应时间快,接通电源零点几秒就可以投入正常工作。达到0.5度每小时的精度,只需50毫秒时间,对武器系统的制导来说,是十分宝贵的。
激光陀螺仪没有活动部件,不存在质量不平衡问题,所以对载体的震动及冲击加速度都不敏感,对重力加速度的敏感度也可忽略不计,因而无需不平衡补偿系统,输出信号没有交叉耦合项,精度高,偏值小于0.001度每小时,随机漂移小于0.001度每小时,长期精度稳定性好,在9年内输出没有任何变化,重复性极好。
激光陀螺仪没有精密零件,组成陀螺的零件品种和数量少,机械加工较少,易于批量生产和自动化生产,成本是常规陀螺的三分之一左右。
激光陀螺仪的技术难题
激光陀螺仪需要突破的主要技术为漂移和闭锁阈值、噪声。
1. 激光陀螺仪的闭锁阈值
闭锁阈值将影响到激光陀螺仪标度因数的线性度和稳定度。闭锁阈值取决于谐振光路中的损耗,主要是反射镜的损耗。
2. 激光陀螺仪的噪声
激光陀螺仪的噪声表现在角速度测量上。噪声主要来自两个方面:一是激光介质的自发发射,这是激光陀螺仪噪声的量子极限。二是机械抖动为目前多数激光陀螺仪采用的偏频技术,在抖动运动变换方向时,抖动角速率较低,在短时间内,低于闭锁阈值,将造成输入信号的漏失,并导致输出信号相位角的随机变化。
3. 激光陀螺仪的飘移
激光陀螺仪的飘移表现为零点偏置的不稳定度,主要误差来源有:谐振光路的折射系数具有各向异性,氦氖等离子在激光管中的流动、介质扩散的各向异性等。


