0 引言
空间技术发展水平是综合国力的标志之一,发射卫星等航天器探索宇宙的活动变得越来越频繁,而获取姿态信息是航天器顺利完成空间任务必不可少的前提。为确保成功获取卫星姿态信息,往往使用多个姿态敏感器,如我国发射的嫦娥一号卫星,携带了太阳敏感器、星敏感器、月球敏感器等多个姿态敏感器。星敏感器是目前精度最高的姿态测量仪器,将成为未来空间活动中首选的测姿仪器。随着APS 传感器技术的发展,将APS 作为星敏感器的图像接收器件,能使整个系统体积减小、功耗降低,已成为星敏感器发展的方向[1-2]。
星敏感器主要有光学系统(包括遮光罩和镜头)、星图识别模块、姿态计算模块等3 个重要部分,光学系统将遥远的恒星成像到焦平面上,得到当前视场中的星图。星图识别模块启用星图识别算法识别星图中的恒星,进而由姿态计算模块得到姿态数据[3]。一般的成像光学系统要求达到衍射极限, 使用ZEMAX 光学设计软件优化设计时基本不需要增加特殊的优化函数。而星敏感器光学系统具有特殊的像质要求,其成像质量必须和识别模块相匹配,星敏感器才能成功实现姿态获取。常规优化设计方法难以得到满意的成像质量。文中通过分析星图识别模块中星像位置提取算法以及星图识别算法,讨论光学系统的像差校正和成像特性要求。根据像质要求,提出约束光线的优化方案。该方案采用ZEMAX 扩展,编写包含约束条件的外部独立程序,运用动态数据交换技术建立外部程序与ZEMAX 通信链接,实现快速的系统优化设计。
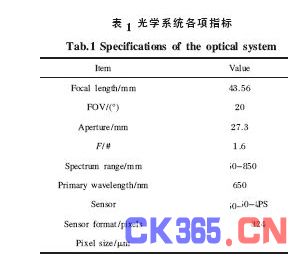
按照以上方案,设计出了一个焦距f=43.56 mm,口径D=27.3 mm,圆视场为20°的APS 星敏感器光学系统。该系统具有像方远心的特点,且每个光学面都是球面,光学材料选用廉价的普通玻璃。仿真设计表明:该系统像质优良,符合星图识别要求。
1 星敏感器光学系统的像质要求
1.1 星敏感器的工作原理
在宇宙中,恒星的位置是相对稳定的,这正是星敏感器能获得高精度姿态数据的原因。通常,恒星非常遥远,处于任何位置观察,方位都一样,与观察者之间的实际距离并无显著关系。天文学上建立第二赤道坐标系作为惯性坐标系,将恒星投影到天球上,以赤径α、赤纬δ 表示其方位,如图1 所示。这些参数已经测量得很精确,与视星等、光谱、自行等等参数一起记录在基础星表中。在惯性坐标系中,恒星相对于观察者的方位,如公式(1)以矢量V 表示:
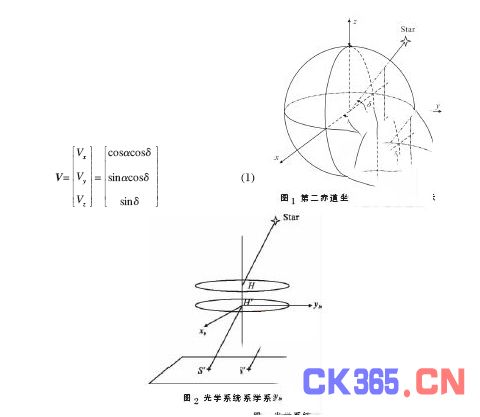
光学系统对视场中的恒星成像是星敏感器姿态测量的前提。将光学系统等效为理想光学系统,以物、像方主面表示,主点分别为H 和H′,如图2 所示,以光学系统像方主点H′为原点建立坐标系统, 即本体坐标系,取光轴为z 轴,正方向指向像面,x 轴、y 轴取在像方主面内。恒星经过系统在像面上成的像为S′。由于此时主点即是节点,因此入射光线SH 平行于出射光线H′S′。假设S′坐标为(xb ,yb ,f),则在本体坐标系中,恒星相对于物方主点的方位矢量Vb为:
对于当前视场中的恒星, 根据它们在本体坐标系中的方位矢量Vb , 可以得到这些恒星的一些特征,通过星图识别,与导航星星库中恒星特征进行匹配,如果匹配结果唯一,则识别成功,从而确定它们在惯性坐标系中的方位矢量V[4]。弄清楚同一颗恒星在两个坐标系中的方位矢量Vb和V 的关系,就可得到两个坐标系三轴之间的旋转关系,从而确定航天器的姿态。
由此可见,星像S′在本体坐标系中位置的准确性直接关系到星图识别成败。恒星目标距离非常遥远,可以看成是点光源,经过光学系统得到的星像,其强度分布正是该光学系统的点扩散函数。对于理想光学系统,星像也只是一个弥散斑,即爱里斑。因此,星像S′的位置以其亮度质心的位置表示。最常用的星像质心算法为[5-6]:
式中:f(xi ,yi )表示单个星像范围中第i 个像元的亮度值。由公式(3)可见:当星像在一个像元内时,得到的位置就是该像元本身的坐标位置。为获得较高的精度,光学系统经过散焦而使星像弥散斑分布在多个像元内,应用公式(3),精度可以达到0.1~0.01 个像元。但扩散范围过大,每个像元上的照度过低,传感器将无法探测。一般要求弥散斑80%以上的能量控制在3×3 个像元范围内。
1.2 光学系统像质要求
光学系统的成像质量应当保证由星图中星像的位置能准确获得对应恒星的方位Vb 。对无穷远的轴外物点成像, 主光线与像面的交点即是获得的实际像,记作Sc ′,它的位置尽可能和图2 中理想像S′的位置一致,因此,光学设计需校正畸变。且各波长主光线与像面的交点也要重合,即校正倍率色差。由于制造装调或者温度变化引起像面位置的轴向移动,将引起Sc ′上下移动。将系统设计成像方远心,可以减少由此引起的误差。
由公式(3)可见:为保证Sc ′即是星像质心,最佳方法是同一恒星发出的光线与像面交点关于Sc ′中心对称,因此,弥散斑和能量分布都关于Sc ′中心对称。通常要求弥散斑为圆形,且各视场成像一致。光学系统首先需校正引起不对称的像差, 即彗差。而像散将导致弥散斑成椭圆形状。场曲的存在,使星像分布在一个弯曲的球面上,它们投影到图像传感器上,将使各视场弥散斑大小不一致。
如上分析, 设计光学系统时, 必需校正彗差、像散、场曲、畸变以及倍率色差。一般要求畸变小于1%,倍率色差校正到衍射极限,即可认为各色光星像中心重合。彗差、像散、场曲的校正使星像近似成圆形。同时球差和位置色差也需有所控制,否则弥散斑直径将过大。
2 光学系统设计
2.1 光学系统优化设计方案
星敏感器光学系统所要达到的像质有别于其他系统,单纯地校正各类像差,并不能获得好的结果。从各种设计结果来看,要求各视场的弥散斑成圆形往往成为设计的难点[7-9],而这个要求满足与否也影响了星敏感器的整体性能。因此,需要特殊的优化设计方案。
首先考虑畸变和倍率色差。畸变指的是实际像Sc ′和理想像S′的高度差,因此,只要控制主光线和近轴主光线,使它们与像面的交点重合,就能校正畸变。而倍率色差是由不同波长同一视场的主光线与像面的交点不重合引起,因此,只要控制各色光的主光线即能校正倍率色差。控制各视场出射主光线与光轴平行,就能实现像方远心。轴外视场同一星点发出的光线中, 如果相同孔径的光线与像面的交点到Sc ′的距离相等,那么弥散斑必然成圆形。而在子午和弧矢方向,也即校正了子午和弧矢彗差,同时使得弥散斑在两个方向扩散一致。
综上所述, 要得到高质量的星敏感器光学镜头,优化设计过程中可以采用约束光线的方法,而不必追究彗差、像散、场曲校正与否。ZEMAX 软件具有强大的光线追迹功能,因此,该方法具有可行性。然而,用户必须编写自定义约束条件, 将之加入到优化函数中。目前有两种途径:一种是使用ZPL 语言,根据约束条件编写程序,然后ZEMAX 通过ZPLM 操作数调用,计算优化函数值,从而优化系统。该方法简单,不需要太多编程经验,但是优化过程中通过每根光线的追迹计算所需要的数据, 然后按照ZPL 程序计算优化函数值,ZEMAX 再作优化。光线追迹和优化函数的计算都由ZEMAX 承担,且所有光线不能一次完成追迹,运算速度很低。另一种方法是使用ZEMAX 扩展,由VC++编写外部可执行程序, 再通过用户自定义操作数UDOP, 使用DDE 技术, 建立外部程序与ZEMAX 的通信链接, 实现两者的数据交换, 从而优化光学系统。该方法由ZEMAX 承担光线追迹,并且所有的光线追迹可以一次完成,而数据计算由外部程序完成,运算速度大大提高。文中采用第二种方法。像方远心较易实现,这里不作介绍。约束条件基本算法如下:
chiefy=... //当前波长实际像高
pwchiefy=... //中心波长实际像高
pchiefy=... //近轴像高
for(i=1;i≤20;i++) // 取多个不同大小的孔径
{tanc=...; // 每个孔径的子午像差
sagc=...; // 每个孔径的弧矢像差
diff=...; //子午、弧矢半径差
......}
如公式(4)定义优化对象,优化使它们的值接近0。
2.2 光学系统设计过程、结果及其评价
参考文献[10]对星图识别算法进行研究,确定了符合实际需要的APS 星敏感器光学系统的各项指标,如表1 所示。设计的第一步,应选择合理的初始结构。根据指标要求,该系统具有中等视场和较大的相对孔径,宜选用双高斯结构。按照设计经验,系统需要8 片左右的镜片,镜片过少,可变参数不足,无法取得较好的像质。所选用的初始结构类似参考文献[8]。然后,将各光学面半径、厚度作为变量, 且全部镜片分离,不采用胶合面,以增加变量数,暂不使用非球面系数。先在ZEMAX 中设置必要参数以及优化函数作优化,使得点列图中弥散斑足够小。如果弥散斑过大,则应当增加镜片。然后,添加用户自定义操作数,链接外部可执行程序,对系统完成优化。公式(4)的5 个优化对象,以及像方远心目标,应妥善选择权重,以免影响其他优化目标的实现。同时,应及时发现明显有背光学设计原理的变化,修改参数,重新优化。如此重复,获得最终设计结果。
文中设计结果如图3 所示,由7 片镜片和一个双胶合镜片组成。优化过程中发现:第5、6 块镜片相邻的两个光学面半径近似相等,因此,将这两个面合并构成双胶合镜片,以简化加工过程,节约成本。最后一个光学面,往往凹向像面,而将该面设为平面,能降低其对像面发出的散射光反射回像面的能力,减少杂光干扰。光学系统各镜片选用了低折射率的普通玻璃,且每个光学面都是球面,易于加工。
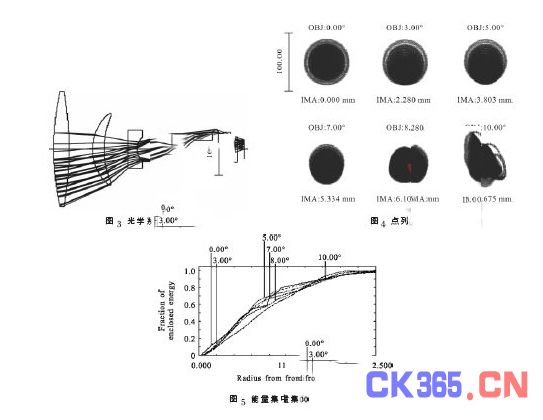
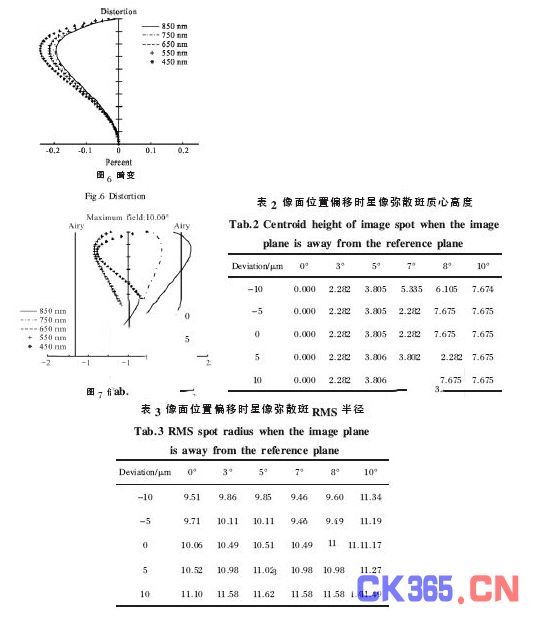
选取0°、3°、5°、7°、8° 、10° 6 个半视场角, 以及450 nm、550 nm、650 nm、750 nm、850 nm 5 个波长,考察光学系统的成像质量。点列图如图4 所示,各视场弥散斑近似圆形,且大小差不多。能量集中度如图5所示, 在3×3 个像元内(半径22.5 μm) 集中了几乎100%的能量,为后续工作增加了冗余度。每个视场的能量集中度曲线走向一致,表明能量分布和弥散斑大小都相似。图6 给出了畸变曲线,最大畸变值不超过0.25%,远高于设计要求。图7 的倍率色差曲线表明:在光谱范围内,各色光的星像中心重合程度满足要求。表2 和表3 给出了当像面前后移动-10~10 μm时,星像弥散斑半径(单位微米)变化和质心位置变化的情况。数据表明:对于温度变化或装调等误差(单毫米)引起的像面偏移,各视场弥散斑半径变化很小(不超过1.75 μm, 约1/9 个像元), 而质心位置很稳定。设计结果表明:该系统具有满意的成像质量,满足星图识别的要求。
3 结论
星敏感器姿态测量的原理决定了光学系统必须满足特殊的像质要求,即各星像弥散斑近似成大小一致的圆形,畸变不超过1%,倍率色差达到衍射极限,光学系统像方远心。针对光学系统像质的特殊要求,采用ZEMAX 扩展和外部编程,构造约束条件, 控制部分光线,以获得好的优化设计结果。相比ZPL 编程优化方法,优化设计速度大大提高。仿真设计表明:该方案切实可行。星敏感器光学系统符合指标要求,成像质量优良,保证了星敏感器较高的整体性能。装调和温度变化将会引起像面偏移,从而产生星像质心误差,最终导致星图识别和姿态测量的失败。设计成像方远心的星敏感器光学系统能有效避免这一不良后果的发生,提高了整体系统的稳定性。