一、工业机器人机构名词解释:
1、关节(Joint):
即运动副,允许机器人手臂各零件之间发生相对运动的机构。

2、连杆(Link):
机器人手臂上被相邻两关节分开的部分。
3、刚度(Stiffness):
机身或臂部在外力作用下抵抗变形的能力。它是用外力和在外力作用方向上的变形量(位移)之比来度量。
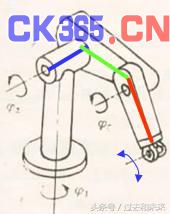
4、自由度(Degree of freedom) :
或者称坐标轴数,是指描述物体运动所需要的独立坐标数。手指的开、合,以及手指关节的自由度一般不包括在内。
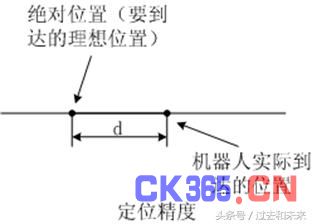
5、定位精度(Positioning accuracy):
指机器人末端参考点实际到达的位置与所需要到达的理想位置之间的差距。
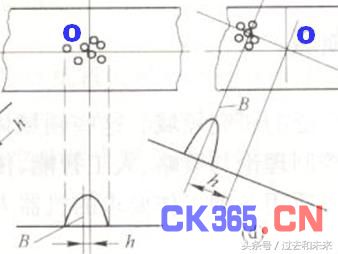
6、重复性(Repeatability)或重复精度:
在相同的位置指令下,机器人连续重复若干次其位置的分散情况。它是衡量一列误差值的密集程度,即重复度。
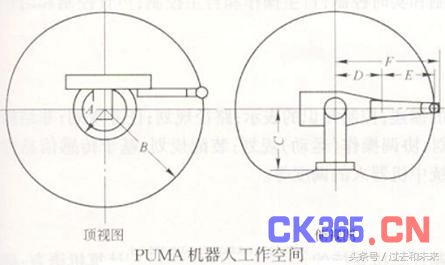
7、工作空间(Working space):
机器人手腕参考点或末端操作器安装点(不包括末端操作器)所能到达的所有空间区域,一般不包括末端操作器本身所能到达的区域。

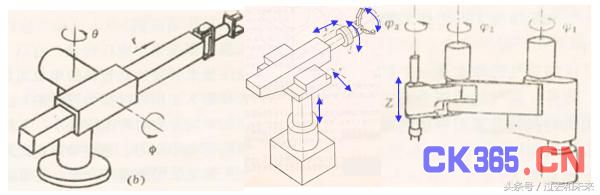
二、工业机器人结构分类
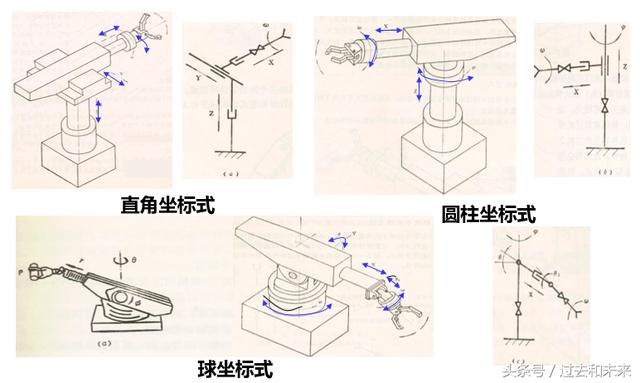
1、工业机器人按坐标分类
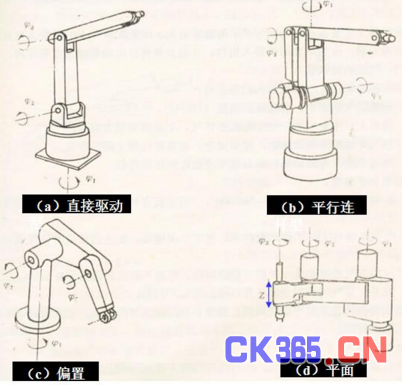
2、工业机器人按驱动分类
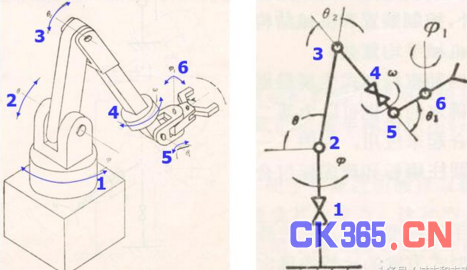
3、六轴工业机器人结构
三、工业机器人夹具结构
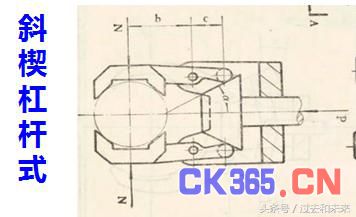
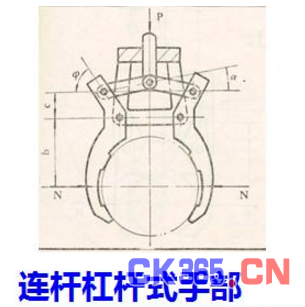
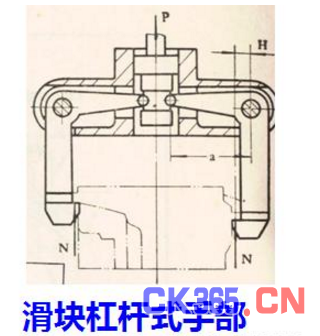
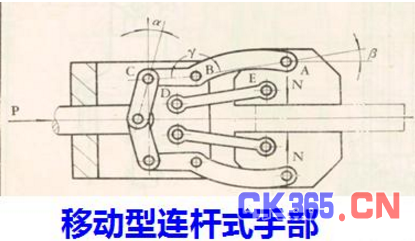
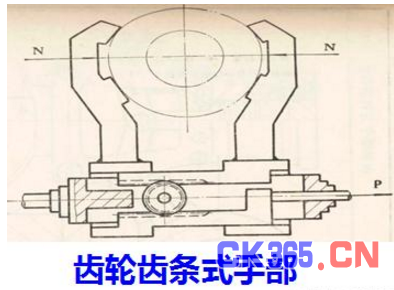
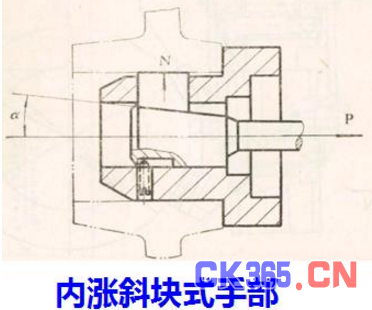
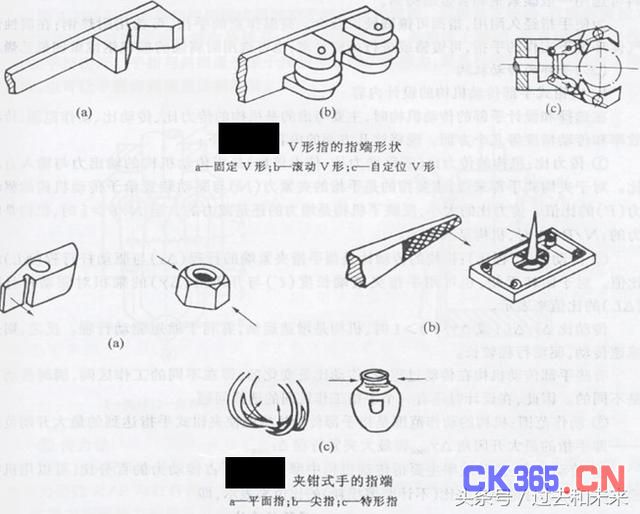
1、工业机器人夹持夹具结构

滑槽杠杆式手部
2、工业机器人吸附夹具结构

电磁式吸盘
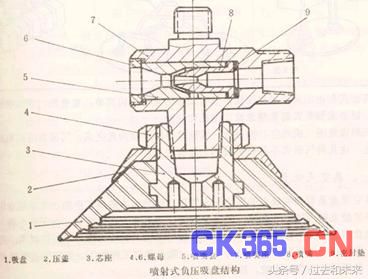
气动吸盘

设计示例
3、工业机器人未来手抓








