1 1 前言
随着航天技术的发展,新型航天飞行器不断涌现,各种用途的 导弹正不断地走向高精度和小型化的道路。高精度要求航天飞行器和导弹的制导控 制精度高、稳定性好,能够适应复杂的外界环境。因此控制算法比较复杂、计算速度快、精 度高。小型化则要求航天飞行器和导弹的体积小、机动性好,在同等有效载荷的情况下,对 控制系统的重量和体积提出了更高的要求,要求控制计算机的性能越高越好,体积越小越好。性能指标和体积限制迫切需要研制新型的弹载控制计算机。 随着数字信号处理器(DSP)性能的迅速提高和成本价格的下 降,DSP的应用范围不断扩大,开始在通用数字信号处理、通讯、语音处理、图像处理、自动控制和仪表仪器及 军事与尖端科技等方面,以其强大的指令系统及接口功能显示出功能强、速度快、编程和开发方便等特点。利用DSP的性能,解决了高速与微型的矛盾,成功研制出了集 高速度、高精度和小型化于一体的基于DSP的新型弹载控制计算机,并通过了地面的性能测 试。
2 2 常用的弹载控制计算机的特点
弹载计算机要求具有实时性、可靠性、嵌入性等特点。实时性要求对输入的信 息数据以最快 的速度处理,以最短的时间延迟输出控制指令去控制导弹的飞行。可靠性要求能够在恶劣的环境条件下使用,抗干扰能力强,要有宽工作温度范围、抗振动和冲击、耐潮湿、抗电磁干 扰等特点。嵌入性要求最轻最小的体积重量。但这些条件很难同时满足,系统设计时,需要综合考虑。
基于PC机和基于单片机是常用的两种弹载控制计算机。
基于PC机的弹载控制计算机是以Intel 80×86为CPU,外围加上相应的协处理器、内存、硬 盘 、接口电路(包括A/D和D/A、串行通讯等)等组成。和普通的商用计算机比较类似,采用高级语音设计,编程比较容易,研制的厂家多,技术也比较成熟;32位字长,有协处理器配合可以作较高精度的浮点运算,主频15~66 MHz,甚至更高,整体速度快,相当于286~486的性能;寻址能力强,可以访问到外部M bit~G bit的空间,能够 进行实时的高精度和高速度计算。但接口能力差,需要较多的外围接口器件配合,体积大,不易实现小型化。
基于单片机的弹载控制计算机主要由以Intel 8031为核心的51系列单片机或96系列单片机组 成中央处理器,外围配以少量的接口器件组成。其接口能力强、I/O管脚多、可直接驱动逻辑电路,功耗大、体积小,可将RAM、ROM、CPU集成在单片上,有的可同 时集成晶振和看门狗WTD电路,减少了系统的复杂程度、方便了使用、提高了可靠性,嵌入性能很好。但其整体计算性能差,这种计算机一般是8位、准16位或16位,没 有浮点运算指令,无法进行复杂的计算,计算精度差;晶振常为1~16 MHz,寻址能力有限, 通常只有几十千字节至几百千字节的能力,无法完成实时计算与高精度的控制任务,一般多 用于简易控制系统中。
DSP同时具备了这两者的优点,可以满足高性能和小型化的要求。
3 3 DSP的发展现状
半导体技术同IT技术一样也在不断地发展。世界上第1个单片DSP是AM I公 司在1978年发布的,定点位数12/16,一次乘法和加法的时间(MAC)为300 ns。在那以后, 世界上有许多著名的半导体厂家陆续推出了自己的DSP,从定点到浮点,生产工艺不断改善 ,硬件资源越来越丰富,运算速度越来越快,性能越来越高,功耗、体积也越来越小。以美国德州仪器公司(TI公司)生产的DSP为例,1982年推出了第1代的定点DSP,到1997年推出 的C 6X浮点DSP以及多处理器芯片TMS320C8X,后者集成了5个高性能的DSP,可以并行运算,实时处理能力达每秒20亿次操作,精度达到了64位。就其1989年推出的第1代浮点DSP而言,MAC 已达60 ns,浮点位数已达40位;具有指令功能强,指令集有113条指令,大部分指令是单周期的,采用流水线操作,支持32位浮点乘法和并行指令;有5类寻址方式,这些类中又 可采用6种寻址类型;16 Mbit可寻址范围。计算速度和精度已达到甚至 超过了PC机的CPU;体积小,具有丰富的硬件资源和灵活方便的接口,使得D SP 在要求高性能和小型化的导弹控制上具有良好的应用条件和前景。 研制基于DSP的新一代弹载控制计算机,虽然有卓越的性能和微小的体积作保证, 但关键在于控制系统整体方案设计。
4 4 基于DSP新型弹载控制计算机的方案设计
在整体方案设计之前,要对导弹的任务和实现的目标作需求分析。根据 导弹总体的要求和控 制对象的复杂程度,选择控制周期;按照控制周期内控制计算量来确定弹上计算的类型和运算速度,并结合外部单元确定接口方案,以及对抗干扰因素的考虑,可确定整体的通讯协议 和接口形式。
4.1控制系统整体组成框图
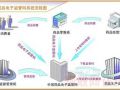
在导弹的飞行过程中,为了精确地命中目标,需要对其飞行姿态进行控制,引导导弹准确飞 向目标。为了进行姿态控制,通常需要获得弹体飞行姿态的实时参数,以及目标和导弹的相对位置关系。有了这些信息参数,经过控制计算机的控制算法计算,实时输出控制量到执行 机构,从而实现对导弹的控制,其构成示意图见图1。
[img]200653116391043086.gif[/img]
图1弹载控制计算机的接口框图
4.2 控制系统整体方案设计原则和设计思路
由图1的接口组成可看出信息数据的流向。接口设计是一个重 要的环节,其设计质量将直接影响系统的性能。为了减轻计算机的负担,外部的输入信号 用中断方式读入,信号输入输出时要考虑抗干扰性。所设计的整体方案要易于实现,对不同 型号的导弹要有一定的适应性,对于要求相近的型号,应该以修改控制软件为主,以少改动或不改动硬件设计为好。这些要求都要在方案设计的各个环节中考虑。
4.3 弹载控制计算机与外围的接口设计
弹载控制计算机与外围的单元进行数据交换时,惯性器件应以脉冲数的 方式将信息数 据送出,由弹载控制计算机对其计数,转换为数据,这样不但加大了弹载控制计算机的负担,而且惯性器件对应的模数转换和隔离也复杂了。参考美国国军标和前苏联 的做法,并考虑到新型敏感装置或惯性器件中都采用了计算机或单片机。为了简化弹载控制计算机与外围单元交换数据的接口电路、减少隔离措施,可采用RS-485、RS-232或RS-422 通讯协议。为了减少弹载控制计算机和外围单元串行通讯的时间开销,同时也为了减少接口器件的数目、提高整体系统的可靠性,选用UART通讯接口芯片,可实现异步串行通 讯、数据采用中断方式读入控制计算机。由于DSP的I/O资源有限,需要控制大量外部接口线,在扩展I/O时,可直接借用UART控制器(如16C550,16C554)的闲置MODEM管 脚,而省去了扩展I/O带来的不可靠因素。
控制伺服机构常用的是4个舵机,飞行中要求这4个舵机同时动作,相互之间不能有延迟。 由于结构上的限制,舵机的控制器离弹载控制计算机有一定的距离,为了抗干扰和提高系统可靠性,仍然需要串行通讯。为了保证控制精度,舵机的伺服控制器一般采用12位或更高的 D/A得到控制指令。如果考虑到通讯的数据量、舵机的工作方式和控制的实时性要求,在满足精度的前提下,选用12位的D/A变换比较合适,如选用MAX536,其通讯的数据格式见图2 。
由图2可知,在1个字的通讯数据中,除了12位的D/A数据外,还可以用高4位地址/命 令位的 不同组合来实现“逐个送数,同时输出”,达到同时控制4个舵机的目的。这样的选择可以实现和C31的无逻辑连接。
[img]200653116393985087.gif[/img]
图2MAX536的数据格式(高位在前)
4.4 DSP的选择
DSP的选择要从控制性能要求、接口、计算速度、计算精度、软件的编 制和软件的移植性等方面考虑。参考图1,由于通讯接口采用了UART控制器,使得原本比较费时的通讯耗时很少,几乎可以不考虑,这样DSP计算速度的选择就由控制方案中控制方程计算量的大 小来定,对于摆动频率不超过10 Hz的小型导弹,采用2 ms控制周期,选用50 MHz晶振的DSP 即 可满足需求。考虑到编程的方便和程序的移植性,选用浮点的DSP比较合适,再加上 对所需硬件资源,又选择了TMS320C31-50及选择微计算机工作模式,其主要硬件资源列于表 1,功能模块如图3所示。对于升级,可以考虑选用TMS320C4X 或TMS320C6X系列。
[img]200653116401751743.gif[/img]
图3TMS320C31的功能模块图
表1TMS320C31主要硬件资源
数据/程序总线 STRB: 32位数据,24位地址
内部RAM 2K字, RAM0 1K; RAM1 1K
串行I/O口 1个高速串行口
DMA控制器 单通道
定时器 两个,32位
外部中断源 4个:INT0~INT3
仿真器接口 1个
互锁信号 两个:XF0,XF1
其他 保持、复位等信号
4.5 控制逻辑的设计
为了进行与外部数据的交换,需要片选、数据线、地址线等时 序信号按照规定的逻辑关系工 作,即系统要在逻辑控制关系的协调下,才能形成工作时序,系统才能正常工作。这种逻辑控制关系一般可用门电路或逻辑宏单元实现。为了实现4.2中的通用性,同时也是为了减少 硬件的数目,提高系统的可靠性,选用了逻辑宏单元。通过对系统所需的逻辑控制信号数目的分析,调试硬件时更改逻辑控制信号,选用了Lattice公司的在线逻辑编 程单元isp1610E。按照逻辑关系,编写出逻辑控制方程,用专用电缆download后,即可实现逻辑控制。调试过程可参考硬件调试流程图。
4.6 4.6 RAM和ROM的选择
TMS320C31型DSP采用改进的哈佛结构,程序和数据统一存放,如果 整个计算程序的大小不超 过2 K×32位,则可以放在DSP内部RAM运行,无需扩展。但由于用户程序一般都会超过2 K, 需 要按照程序的大小扩展32位的RAM。所选择RAM的速度必须小于DSP的读写周期。TMS320C31-5 0全速运行时的读写周期为20 ns,因此,选择了4片15 ns的128 K×8位RAM来组成系统的RAM 。 当DSP工作在微计算机模式时,程序要存放在EEPROM或FLASH中,在系统上电时,由Bootlood 程序搬移到外部的RAM中运行。选择ROM时,同样需要考虑容量和速度,由于DSP总线最多有7 个周期的延迟,因此,ROM的速度最慢不
技术中心