摘要:介绍了一个基于单片机的电子式转速里程表实现方案,讨论了里程计数的原理和转速指示原理,给出了用单片机AT89C2051和LM1819驱动器设计的汽车转速里程表的具体电路原理图。
1 概述
传统的汽车转速里程表的功能有两个,一是用指针指示汽车行驶的瞬时车速,二是用机械计数器记录汽车行驶的累计里程。现代汽车正向高速化方向发展,随着车速的提高,用软轴驱动的传统车速里程表受到前所未有的挑战,这是因为软轴在高速旋转时,由于受钢丝交变应力极限的限制而容易断裂,同时,软轴布置过长会出现形变过大或运动迟滞等现象,而且,对于不同的车型,转速里程表的安装位置也会受到软轴长度及弯曲度的限制。凡此种种,使得基于非接触式转速传感器的电子式转速里程表得以迅速发展。
2 里程累计实现原理
车速里程表的速比表示的是:车速里程表转轴(软轴)在汽车行驶一公里时所转过的转数。 基于单片机的车速里程表采用霍尔型非接触式转速传感器。这种车速里程表转轴每转一圈,霍尔传感器将感应发出8个脉冲。现在以速比为1:624的车型为例? 汽车行驶一公里? 则霍尔传感器发出的脉冲数共为8×624=4992个,或者说,每个脉冲代表了1/4992公里的里程。将这些脉冲信号当作外部中断源输入给单片机,使每个脉冲产生一个中断,并通过中断服务程序对每个脉冲进行计数,这样,当计满4992时,表明汽车行驶了1公里,然后再给累计单元加一,并存入EEPROM单元,最后通过刷新LCD液晶显示器,即可实现里程计数功能。但在编程时要注意,MCS-51系列单片机的外部中断有两种触发方式,即电平触发和边沿触发,本设计选用边沿触发方式,即采用负跳变引起中断。

3 车速测量及指示原理
车速指示可采用双线圈汽车转速表头,它由空气轴表芯和驱动电路组成,空气轴表芯通常由三部分组成:磁铁、与转轴相连的指针和两个互成九十度的线圈。转轴是表芯唯一的可动部件,磁铁的转角总是趋向于两个线圈的磁场强度矢量的合成方向,磁场强度正比于加在线圈上的电压,因此,通过改变电压的极性和幅度,可在理论上使转轴组件在0~360度范围内转动。显然,只要能按一定的规律驱动两个线圈,就可以使指针偏转位置与输入量成线性关系,即满足下列公式:
θ=KVin
其中θ为指针偏转角,单位为度; K为转角常数,单位为度/V; Vin是输入电压,单位为V。
每个线圈的磁场强度矢量之和必须跟随偏转角θ。考虑到转轴组件总是指向Hsine和Hcosine这两个正交矢量之和的方向?则其方向可由下式求得?
θ=arctan Hsine/Hcosine
并由此可以得出:
θ=arctan sinθ/cosθ
由上述公式可见?当Hsine按θ的正弦函数变化,而Hcosine按θ的余弦函数变化时?所得到的总磁场强度的方向与θ角的方向相同,由于转轴组件与磁场强度矢量和的方向相同,因此,指针将始终指向θ角的方向。
图1所示是LM1819驱动器的内部组成原理框图,它由电荷泵、整形器、函数发生器等组成?输入的转速信号通过内部的三极管缓冲后,输入到电荷泵即可进行F/V频率电压转换,两个输出端按输入量的正弦和余弦函数变化,2脚和12脚的最小驱动能力为±20mA(±4V),线圈的公共端接到1脚可为内部函数发生器提供反馈信号, 同时为5.1V齐纳二极管提供参考电压。在该电路中,K=54°/V,输入Vin 实际上是4脚和8脚的电位差,8脚既是诺顿放大器的输出, 又是函数发生器的输入,一般4脚的电压是2.1V,所以有:
θ=K(V8-Vref)=54(V8-2.1)
由于V8是在2.1V~7.1V的范围内变化的,故LM1819可以驱动十字表头以使其在0°~270°范围内转动。
4 电路原理图
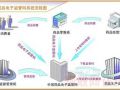
图2所示是一种汽车转速里程表的电路原理图。这是一个典型的单片机最小应用系统。单片机AT89C2051以其低价、低功耗、可靠性高和易于编程等特点著称,X25045则是MCS-51系列单片机电路的一个辅助芯片,主要担当复位、电压检测、看门狗和EEPROM功能,该芯片的采用大大提高了系统的可靠性,减少了外围芯片数,可实现里程累计的掉电存储。LCM1010为十位八段式带背光液晶显示模块,采用三线串行接口,它具有功耗低和编程方便的特点。该显示共分两行显示,第一行6位显示累计里程,第二行4位(1位小数)用于显示小计里程。图中K1为小计里程清零键,R4用于调节液晶显示器的视角对比度。芯片X25045是Xicor公司推出的带有可编程μP 监控器的CMOS串行EEPROM,带有4096位,按512×8来组织。它具有4字节页写方式和10万次使用周期,数据可保存100年。为了保证累计里程单元的个位或小计单元的小数位可靠刷新,当这些单元接近极限使用周期时,可采取换页的办法来使这些数据移动到新单元以继续计数。
图2
霍尔传感器发出的脉冲信号经过整形可分成两路,一路送到单片机的INT1端用于累计里程计数,另一路送到LM1819驱动器的转速信号输入端(10脚),然后由驱动电路根据输入信号的频率在2脚和12脚输出相应的正弦和余弦驱动信号,十字线圈产生的磁场共同作用于磁铁可使转轴组件偏转相应的角度。但调整时要注意,电容C3的大小会改变表针偏转的平滑性,C3越大,平滑性越好,但同时时间迟滞也会加大,而C3过小会使表针抖动;C4可用于调整电路的线性和滞后误差;R4的值可以改变表针的指示刻度点。
5 结论
本设计以单片机AT89C2051来实现里程累计、小计、清零及存储,并以LM1819集成电路驱动十字线圈表头,从而实现了车速的指示。该设计方案成本低廉、指针稳定性好、响应速度快、抗震性强、可靠性和性价比都很高。经实际使用证明,该里程表完全可以取代传统的以软轴驱动的车速里程表。当然,这只是一种实现方案,也可以由单片机通过软件来驱动十字线圈表头,即由单片机分别控制表头的正弦线圈和余弦线圈而省去LM1819集成电路。对此,此处不再赘述。