1 引 言
工业热处理过程中温度是一个及其重要的待测参量,传统接触式测温方法存在着许多局限性。近年来,基于面阵图像传感器的温度场测量已受到人们的广泛关注,日本、芬兰等国开发出的火焰识别系统已投入电厂运行[1,2],我国华中科技大学、浙江大学也开展了该项研究并取得了一定的成果[3,4]。但面阵彩色CCD只能获取可见光内的三个波段(RGB)的光谱响应值,且对硬件系统要求苛刻,传输复杂,数据处理量大,不便于现场调试。而线阵CCD波长选择范围宽,通信快捷,外围电路简单,易于工程的实现。本文基于比色测温原理提出了一种线阵CCD温度测量方法。为减少误差,采用了信息融合技术,对来自多个传感器的多源信息进行相关和结合以达到精确的估计[5]。实验时选择了多个波长组合,并通过比较融合前后的估计值,证明了该方法的可行性。
2 测温系统的组成及其原理
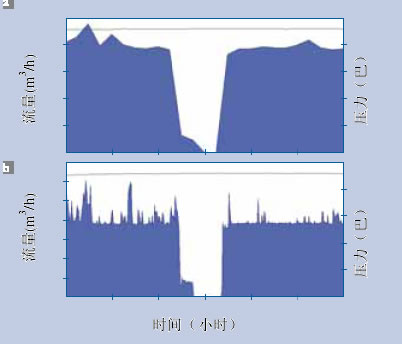
实验采用了高灵敏度TCD1206SUP线阵CCD和2.5kW热处理炉,采用标准铂铑热电偶做同步温度监测。系统示意图如图1所示。

被测目标经光学系统成像在CCD上,首先通过窄带滤光片可得到单色辐射图像,然后经图像采集卡和高速A/D转换后送入计算机进行处理。
当物体的辐射波长范围为400~750nm,温度范围为3000K以下时,Plank辐射定律可由Wein辐射定律取代。假设被测目标为灰体,则由比色法得到的某点的温度值为
式中:c1和c2分别为Plank第一常数和第二常数;λ为波长;M为在某波长和温度下的单色辐射出射度。CCD摄像机将来自炉膛内的热辐射能转化为与之成正比的电信号,利用式(1)可得到CCD双色测温公式:

式中:S表示波长为λ、温度为T下的光强值;k是与λ有关的而与T无关的常数,它与测量系统的光谱响应率、光学元件透射比、光电转换系数等有关,可通过黑体炉标定出来。
从式(2)可以看出,只要在同一点获得任意两个波长下的辐射光强比,即可求出该点的温度。从理论上讲,无论波长取何值,求得的温度值都应该是相等的,但在实际测量过程中,由于受多种因素的影响,比如灰体假设、测温系统的误差、周围环境的干扰等,使各温度值之间偏差较大,因此需要做融合处理。
3 基于自适应加权的数据融合算法
传统的数据融合方法大多采用算术均值法,该方法是按等精度测量来考虑的,即认为在测量过程中采样数据的可靠性相同且具有同样的精度。但在测量过程中复杂的现场环境和人为等因素都会构成不等精度测量。基于自适应加权的数据融合算法不要求测量数据的任何先验知识,仅依据各传感器的测量值以自适应的方式寻找相应的权数,在总均方误差最小的条件下使融合后的估计值得到优化,其原理图如图2所示。
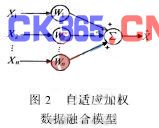
设有n个传感器对同一对象进行采样检测,各传感器的测量值分别为X1,X2,…,Xn,彼此之间相互独立,X为待估计值的真值,σ2i为第i个传感器的方差,Wi为各传感器相应的权数,i =1,…,n。由自适应加权数据融合算法得到的融合后的估计值为

4 实验研究
文献[6]表明,当测温范围为500~3000K时,波长取可见光,波长差取50~100nm。通过比较,选择λ1=527nm,λ2=579nm,λ3=640nm对炉体进行测量,并任选两个波长,利用式(2)获取相应的温度值,分别记为Tλ1λ2,Tλ2λ3,Tλ1λ3(相当于三个温度传感器)。为便于分析比较,采用标准铂铑热电偶进行炉温监测,以其测得值作为真实值。当真温分别为T1(938℃),T2(1020℃)和T3(1157℃)时,得到的各传感器的输出分别如表1、表2和表3所示。

根据上述结果分别用传统的取算术均值方法和自适应加权数据融合算法进行了估计。设第i个传感器对目标进行k次测量,测量均值为


采用自适应加权融合算法需要预先知道各传感器的加权因子Wi,由式(6)和式(7)可知,Wi和总体均方差σ2均由各传感器的方差σ2i(i=1,…,n)决定。
设第i个传感器k次测量的方差为

最末值即为方差估计,即σ2i=σ2ik。然后利用式(6)求出不同温度下的各传感器的加权因子Wi。计算结果如表5所示。

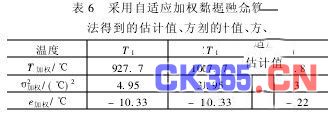
利用式(3)和式(7)得到的各温度下的融合估计T^加权、总体方差^σ2加权和与真值间的误差e加权如表6所示。
5 结 论
工业高温计的误差允许范围为测量值的±1%~±2%[7]。从表6可以看出,采用自适应加权融合方法得到的结果是比较理想的,其相对误差分别为1.10%,1.17%和1.14%,在高温炉体误差的允许范围之内。比较表4和表6,加权数据融合的结果更接近真值,与直接取算术平均值相比,准确度分别提高了0.90%,0.76%和1.12%,且由加权融合方法得到的均方差既小于单个传感器的均方差,同时也远小于各传感器均值估计的均方差。